In der heutigen Automobilbranche sind Fahrzeugumgebungssensoren unverzichtbar, um uns sicher auf der Straße zu halten. Sie liefern eine Fülle von Informationen, von der Überwachung von Verkehrsteilnehmern bis zur Erkennung von Fahrbahnmarkierungen und Hindernissen.
Aber was passiert im Hintergrund, um diese Daten in handlungsreife Erkenntnisse zu verwandeln? Hier kommt Sedenius Engineering ins Spiel!
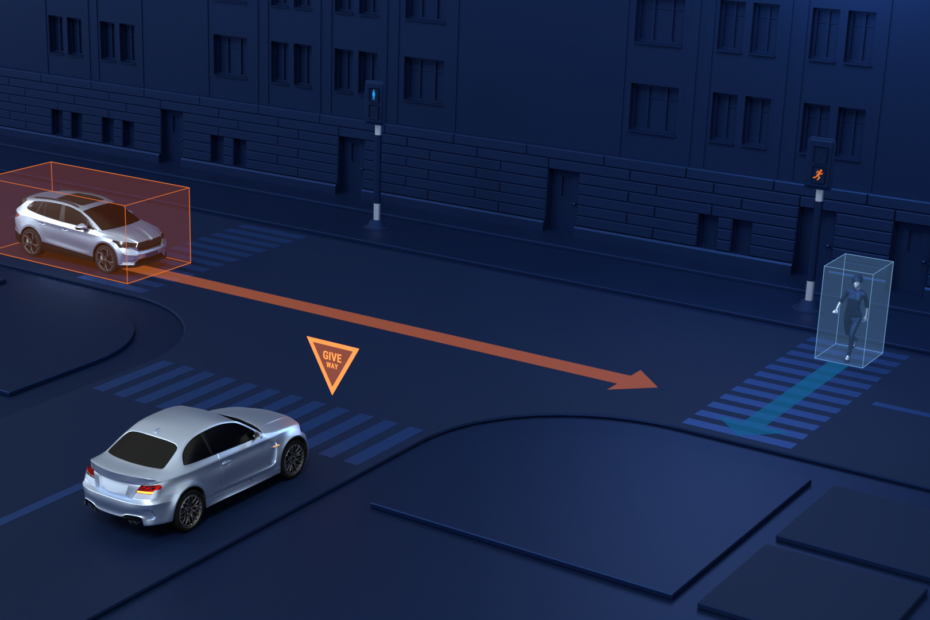
Bei Sedenius sind wir darauf spezialisiert, präzise Umgebungsmodelle auf der Grundlage der Fahrzeugsensoren zu erstellen.
Unser Ziel? Verkehrsszenarien mit beispielloser Realitätsnähe nachzubilden, um eine vorausschauende Sicht und Situationsanalysen zu ermöglichen.
Unsere Stärke liegt in der Entwicklung modernster Algorithmen, die das volle Potenzial der Fahrzeugsensoren nutzen. Ob Objektfusion, Spurfusion, Bildverarbeitung oder die Anwendung Künstlicher Intelligenz.
Unsere Kernkompetenzen:
👉 Bussysteme: CAN, CAN-FD, Flexray, Automotive Ethernet, SomeIP und mehr.
👉 Busbeschreibungen: ARXML (Autosar), Fibex, DBC.
👉 Fusionsalgorithmen: Kalman-Filter, Dempster-Shafer, numerische Optimierung.
👉 Entwicklung mit C++ (bis zu C++23), Boost, OpenCV und anderen beliebten Bibliotheken unter Windows und Linux.
👉 Umsetzung mit ROS2 und ADTF3.
Bei Sedenius Engineering geht es nicht nur um Technologie; es geht um maßgeschneiderte Lösungen, die die Innovation in der Automobilbranche vorantreiben.
Bei Fragen oder für einem persönlichen Austausch stehen unsere Geschäftsführer Andreas Amann und Marcel Graef gern zur Verfügung.