Autonomous Air Navigation with 3D Maps
Abbildung: Copyright Fraunhofer Institut
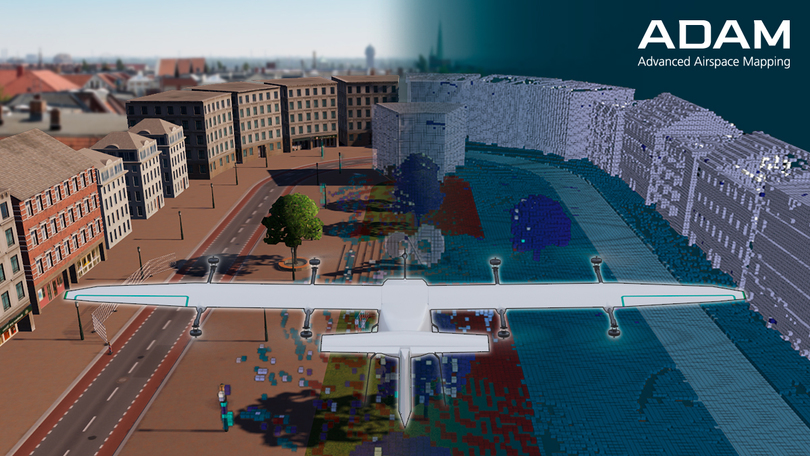
ADAM (Advanced Airspace Mapping) – Autonomous Air Navigation with 3D Maps
The ADAM project develops innovative 3D Maps that will enhance the safety and planning of drones and autonomous aircraft in lower airspace. These maps are intended to be available as a useful service in the aviation sector in the future. Furthermore, they can be used for establishing digital test fields and virtual environments for testing purposes.
Innovations for Autonomous Flight Navigation
With the increasing popularity of air taxis and delivery drones, the requirements for safe and autonomous flight navigation are growing. Particularly at low altitudes, drones need to detect obstacles to fly safely. While cars already use digital maps for autonomous driving, such maps are lacking for drone navigation. The ADAM project aims to fill this gap.
Mapping with Drones for 3D Maps
ADAM utilizes drones for mapping to create specialized maps. These maps contain crucial information and are created using artificial intelligence. They help drones fly safely at low altitudes and ensure timely detection of obstacles. These maps are expected to be integrated into air traffic control technology in the future, thus enhancing safety.
How about the implementation?
The existing virtual and real test field will be expanded to accommodate the development of an advanced drone. This drone will be equipped with special sensors that enable it to accurately detect obstacles. Additionally, digital mapping of lower airspace will be conducted in the test environment to gather precise data. This data serves as a reference for the aforementioned maps developed as part of the project. A particular focus is on the development of intelligent algorithms capable of automatically annotating the 3D Maps. This turns the maps into an important basis for planning optimal flight routes. Georeferenced 3D Maps containing vital information will also be created within the project, which can be integrated into air traffic technology. At the conclusion of the project, a demonstration of autonomous flights based on the developed highly accurate 3D Maps is planned.
Positive Impacts of 3D Maps on Autonomous Flight Navigation
The use of these maps will make drone operations safer and facilitate the approval of autonomous aircraft. This means fewer expensive sensors are needed on drones, allowing for a greater focus on detecting other aircraft. The ADAM project will contribute to making airspace safer and enabling new services for aviation. It also supports the federal initiative to establish a German urban air traffic market.
Sedenius Focus Areas
The development of AI-based trajectory planning on 3D Maps involves several crucial steps. This includes calculating a collision-free target trajectory while considering static and dynamic objects in the target corridor. Following this calculation, a redundant collision check and evaluation of the target maneuvers are conducted, with subsequent feedback to the control center.
Another focus is on the design and implementation of the graphical interface of the control center. The environmental model is successfully transferred to the control center, with the control center’s UI providing a visual representation. The control center monitors the timeliness of the environmental model, the drone’s trajectory interface, and navigation-relevant system states. Additionally, the control center offers an interactive environmental model with a user interface to control the drone in the (virtual) test field.
Manual trajectory configuration, trajectory transmission, and trajectory execution are carried out through the desired state specification, in the form of a pose including derivatives. The trajectory interface enables drone control considering latencies in the transmission path.
An important integration is the incorporation of the control center into the simulation environment to test the developed components. This includes virtualization of a sample route for the simulative development of planners and controllers in a closed simulation environment.
Validation of collision avoidance algorithms is performed using the overall simulation. Additionally, online transmission is successfully integrated into the established control center. This comprehensive process ensures efficient development and precise validation of AI-based trajectory planning on 3D Maps.
Fact sheet
| Association coordinator | Fraunhofer-Institut für Verkehrs- und Infrastruktursysteme IVI |
| Volume (at the time of approval) | 4.431.693,29 Euro (65,24 % funding by BMDV) |
| Term (at the time of approval) | 09/2023 – 08/2026 |
| Project partner | Continental Automotive Technologies GmbH, Frankfurt am Main , Autonom Elektrisch Fliegen gGmbH, Kamenz , Airclip Service GmbH & Co KG Dresden, Droniq GmbH, Frankfurt am Main, BIT Technology Solutions GmbH, München, PKTEC Pauli & Kayser Ingenieurgesellschaft mbH, Schutterwald, Technische Universität München, München, Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB |